به گزارش گروه دانش خبرگزاری دانا (دانا خبر) و به نقل از ایسنا، این مفاهیم شامل رباتهای چندکارهای هستند که برای کاوش فضایی خودکار و کمک به فضانوردان در مطالعه جهانهای دیگر طراحی شدهاند.
آژانس فضایی اروپا دهههاست به علم رباتیک علاقهمند است و با نزدیک شدن تاریخ پرتاب کاوشگر ExoMars در سال 2018، این علاقه رو به افزایش است.
ویدیوی جدید این آژانس برای ارایه ایدهای در خصوص چگونگی کاوش های رباتیک آتی به نمایش گذاشته شده و سناریویی فرضی از سفرهای ماه را در اختیار فضانوردان میگذارد.
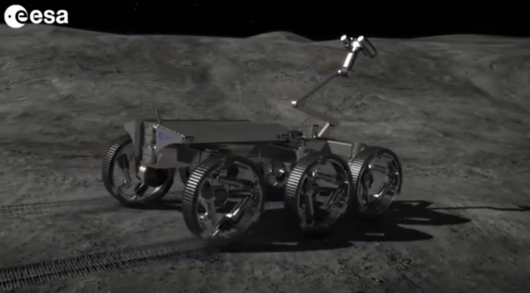
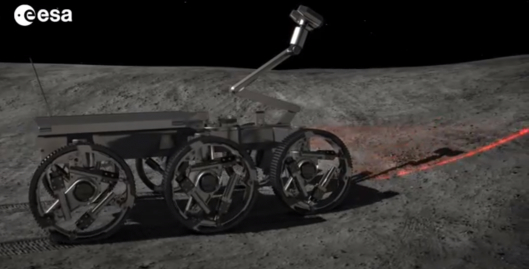
در این ویدیو، مفهومی از کاوشگر آینده ماه مشاهده میشود که از لیزر برای اسکن زمین پیش روی خود استفاده میکند.
رنگ قرمز این لیزر نشاندهنده آن است که سامانه مزبور، زمینی شیبدار و خشن را کشف کرده که حرکت از خلال آن دشوار است.
چرخهای این کاوشگر ممکن است پیچیده و طراحی کلی آن اندکی آسان به نظر برسد، اما این امر دلیل خاص خود را دارد.
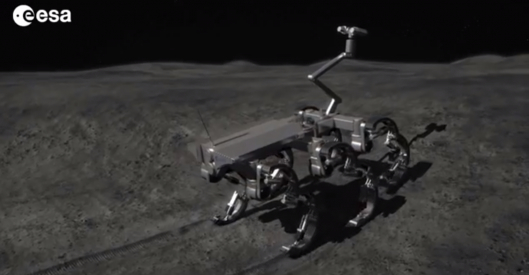
این کاوشگر به جای حرکت در دامنهها با پاهایش، آنها را باز و به پاهایی تبدیل میکند که سپس با استفاده از آنها مانند یک حشره از تپه بالا برود.
تیم کنترل ماموریت در زمین نیز با استفاده از نمایش مجازی فعالیتهای ربات، حرکت آن را رهگیری خواهند کرد.
در ویدیوی منتشرشده، این کاوشگر در حال شناسایی و نقشهبرداری از یک صخره برای جمعآوری نمونه موردی است.
چرخهای متحولشونده بر روی این کاوشگر فقط برای پیادهروی نیستند و جای بازوها را نیز میگیرند.
در این فیلم همچنین کاوشگری مشاهده میشود که باز نشده و از ماژول جمعآوریاش برای نمونهبرداری از یک صخره استفاده میکند.
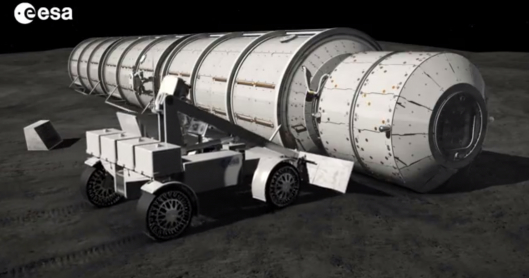
طی سالهای گذشته بحثهای فراوانی در خصوص استعمار ماه وجود داشته اما به نظر میرسد کسی علاقهمند به چگونگی پیادهکردن محموله پس از فرود کاوشگر بر روی این قمر نیست.
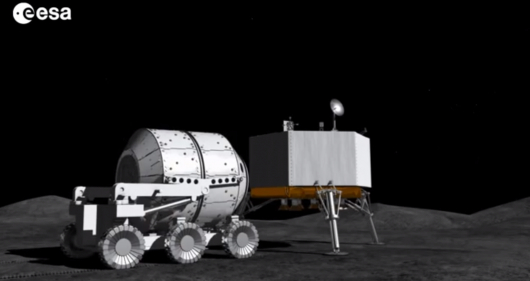
آژانس فضایی اروپا با ارایه جرثقیل چنگکدار رباتیک، به معرفی راهکاری پرداخته که برای گرفتن محموله و دیگر ماژولها و حمل آنها به پایگاه ماه طراحی شده است.
در این ویدیو، ماژولی مشاهده میشود که بر روی یک بالابرنده ربات، با هدف حملونقل پس از جاگیری برای تخلیه بار نهایی به کار میرود.
بالابر زمانی که در مکان تعیینشده قرار میگیرد، مسوولیتش را تغییر داده و ماژول را برای برقراری ارتباط با دیگر بخشها آماده میکند.
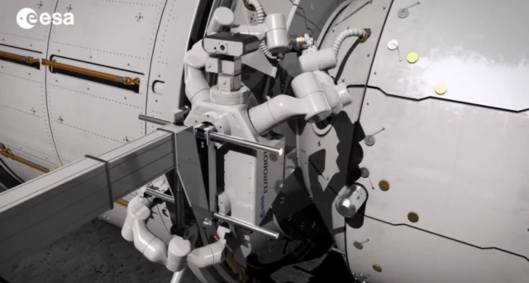
یکی از مشکلات بغرنجی که در ساخت ایستگاه بینالمللی فضایی بروز کرد، این بود که ساختوساز فضایی فقط موضوع متصلکردن ماژولها به یکدیگر نیست، بلکه شامل فعالیت طاقتفرسای اتصال خطوط نیرو، شلنگهای هوایی، لولههای آب، لینکهای داده و سایر مولفهها نیز هست.
این عمل به اندازه کافی بر روی زمین دشوار است و بر روی ماه نیز پوشیدن دستکشهای پلاستیکی متورم مانند نخ کردن یک سوزن با چکش است.
در ویدیوی منتشرشده ربات عملگر از راه دور مفهومی آژانس فضایی اروپا دیده میشود که با خط سرویسرسانی جفت میشود.
بسته به پیشرفت این سیستمها، ربات میتواند این عمل را به صوت خودکار و یا تحت هدایت یک فضانورد و در داخل خود پایگاه انجام دهد.
در این ویدیو ابزاری به چشم میخورد که مجهز به ماژول بوده و فضانورد از آن برای بالابردن خاک ماه با هدف پیریزی پایگاه استفاده میکند.