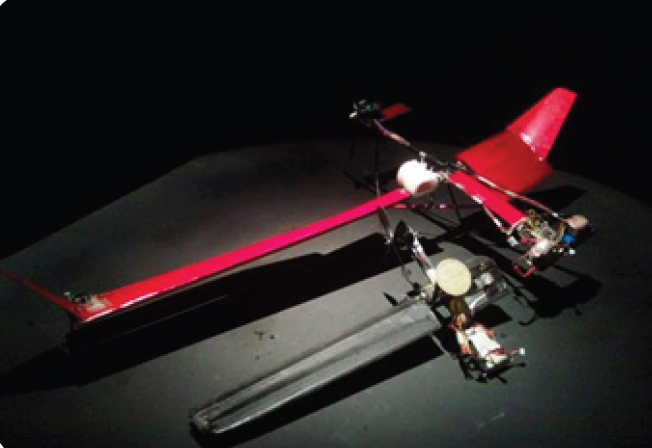
 احمد صفایی، محقق ایرانی و مخترع این طرح در گفت وگو با خبرنگار گروه دانش خبرگزاری دانا (دانا خبر) در خصوص این مونوکوپتر گفت: مونوکوپتر کنترل پذیر یک پرنده است که یک بال دارد و به واسطه نیروی پیشران موتور، حول مرکز جرم خود میچرخد و نیروی لیفت لازم برای بلند شدنش را تامین میکند.
احمد صفایی، محقق ایرانی و مخترع این طرح در گفت وگو با خبرنگار گروه دانش خبرگزاری دانا (دانا خبر) در خصوص این مونوکوپتر گفت: مونوکوپتر کنترل پذیر یک پرنده است که یک بال دارد و به واسطه نیروی پیشران موتور، حول مرکز جرم خود میچرخد و نیروی لیفت لازم برای بلند شدنش را تامین میکند.
وی افزود: ما در این طرح برای کنترل حرکت پرنده، یک بالک متحرک نیز به انتهای بال اضافه کرده ایم تا فرمان کنترلی مناسب تولید شده توسط سیستم اویونیک، از طریق عملگر به آن اعمال میشود.
این محقق اظهار داشت: دینامیک این پرنده هم به واسطه وجود حرکت ژیروسکوپیک، پایدار است اما از سوی دیگر این پدیده سبب بروز برخی پیچیدگیهای دینامیکی مانند اختلاف فاز یا لختی زیاد سیستم میشود. همچنین در طراحی پرنده هم رعایت تعادل وزنی و محاسبه ممان اینرسی بسیار دقیق انجام شده است.
صفایی تصریح کرد: ما در این طرح از دو روش استفاده کرده ایم. در روش اول با تعبیه کردن یک منبع نوری اصلی در محیط و با قرار دادن مجموعهای از سنسورهای نوری بر روی پرنده، زاویه هدینگ پرنده نسبت به مرجع (منبع نور) به دست میآید.
وی گفت: روش دوم به عنوان طرح اصلی محسوب می شود. این روش را سایر سازندگان و طراحان پرنده مونوکوپتر هم استفاده کرده اند. این روش بر مبنای استفاده از سنسور تعیین وضعیت و سمت، برای مشخص کردن زاویه مرجع نسبت به شمال مغناطیسی طراحی شده است.
